Erinevus lehekülje "Roolimasin" redaktsioonide vahel
(Uus lehekülg: ''''Roolimasin''' on rooliseadme täiturmehhanism, mis koosneb täiturmootorist koos selle juhtimiseks vajalike seadmete ja süsteemidega. Rikete ja avariijuhtumit...') |
(link) |
||
| (ei näidata 2 kasutaja 4 vahepealset redaktsiooni) | |||
| 1. rida: | 1. rida: | ||
| − | '''Roolimasin''' on [[rooliseade|rooliseadme]] täiturmehhanism, mis koosneb täiturmootorist koos selle juhtimiseks vajalike seadmete ja süsteemidega | + | '''Roolimasin''' on [[rooliseade|rooliseadme]] täiturmehhanism, mis koosneb täiturmootorist koos selle juhtimiseks vajalike seadmete ja süsteemidega. |
| − | + | Rikete ja avariijuhtumite puhuks peab laevadel olema lisaks pearoolimasinale ka abiroolimasin (varuroolimasin). Pea- ja abiroolimasina juhtimissüsteemid on dubleeritud (on põhi- ja varusüsteem) ja voolukatkestuse puhul rakenduvad roolimasinad töösse [[avariidiiselgeneraator]]i käivitumisel või elektrivarustuse taastumisel automaatselt. [[Rumpliruum]]i paigutatakse ka avariijuhtimisseadmed, näidikud ja sidevahendid [[komandosild|komandosillaga]]. | |
| − | |||
| − | |||
| − | + | Vastavalt nõuetele peab pearoolimasin juhtsignaali saamisel tagama [[rool]]i panekut 35° ühest [[parras|pardast]] 35° teise pardasse, kui [[laev]] liigub ekspluatatsioonikiirusega ja on suurima [[süvis]]ega ning selleks ei või kuluda rohkem kui 28 sekundit. Abiroolimasin peab tagama rooli panekut 15° ühest pardast 15° teise pardasse mitte enama kui 60 sekundi jooksul, kui laev on suurima süvisega ja liigub ekspluatatsioonikiirusega või kiirusega 7 [[sõlm]]e (sõltuvalt sellest, kumb on suurem). Kui rooliseadme juurde kuulub kaks või enam ühesugust autonoomset roolimasinat, võib abirooliseade puududa. | |
| − | ''' Elektrilise roolimasina''' põhiosa on [[paller]]il vabalt pööratav hammassektor, mis on seotud rumpliga elastse sidestusega (tavaliselt vedruamortisaatoriga) roolilt edastuvate lainelöökide summutamiseks. Juhtsignaali saamisel pannakse hammassektor liikuma silindrilise hammasrattaga, mille paneb pöörlema elektrimootor läbi diferentsiaaltigureduktori. | + | Varasemal ajal kasutati [[laev]]adel rooli pööramiseks mehaanilisi käsiajameid, kus jõumoment [[rooliratas|roolirattalt]] edastati [[rumpel|rumplile]] tross-, kett- või võllülekandega, praegu võib neid olla kasutusel vaid väikestel alustel (nt [[väikelaev]]adel ja kaatritel) või abirooliseadmena. 19. sajandi lõpus hakati laevadele paigaldama käsiajami asemel aurukäitatavat roolimasinat, mida nüüdisajal praktiliselt enam ei kasutata. Nüüdislaevadel on kasutusel elektrilised või elektrohüdraulilised roolimasinad. |
| + | |||
| + | '''Elektrilise roolimasina''' põhiosa on [[paller]]il vabalt pööratav hammassektor, mis on seotud rumpliga elastse sidestusega (tavaliselt vedruamortisaatoriga) roolilt edastuvate lainelöökide summutamiseks. Juhtsignaali saamisel pannakse hammassektor liikuma silindrilise hammasrattaga, mille paneb pöörlema elektrimootor läbi diferentsiaaltigureduktori. | ||
'''Elektrohüdraulilise roolimasina''' täiturajamiks võib olla: | '''Elektrohüdraulilise roolimasina''' täiturajamiks võib olla: | ||
*hammaslatt hüdromootoriga roolimasin - hüdrosilindris olev hammaslattkolb, mis pannakse liikuma juhtsignaali saamisel hüdrosilindri vastavasse töökambrisse pumbatava hüdroõli rõhu toimel, pöörab pallerit selle otsale kinnitatud silindrilise hammasratta kaudu | *hammaslatt hüdromootoriga roolimasin - hüdrosilindris olev hammaslattkolb, mis pannakse liikuma juhtsignaali saamisel hüdrosilindri vastavasse töökambrisse pumbatava hüdroõli rõhu toimel, pöörab pallerit selle otsale kinnitatud silindrilise hammasratta kaudu | ||
| − | *kahe või nelja hüdrosilindriga roolimasin – hüdrosilindrite varbkolvid on šarniirse liuguri ja risttala kaudu ühendatud rumpliga. Juhtsignaali saamisel surutakse hüdroõli torustiku kaudu | + | *kahe või nelja hüdrosilindriga roolimasin – hüdrosilindrite varbkolvid on šarniirse liuguri ja risttala kaudu ühendatud rumpliga. Juhtsignaali saamisel surutakse hüdroõli torustiku kaudu hüdrosilindrite vastavasse poolde ja varbkolvide sisse- või väljaliikumisega pööratakse rumpli ja palleri kaudu roolilehte juhtsignaaliga antud nurga võrra |
| − | *labapöördhüdromootor – | + | *labapöördhüdromootor – mootori silindrilises keres asub otse palleri koonusele kinnitatud töölabadega rootor. Töölabad ja kere siseseinale kinnitatud töölabade liikumise piirajad moodustavad survekambrid, kuhu juhtsignaali saamisel suunatav hüdroõli rõhk paneb rootori pöörlema ja sellega koos ka palleri. |
Hüdrosüsteemide õlitoite allikaks on, sõltuvalt roolimasina liigist, erineva arvu, konstruktsiooni ja tööpõhimõttega hüdropumbad (kolb-rotatsioonradiaal-, kolb-rotatsioonaksiaal-, hammasratas-, siiber- või kruvipumbad). | Hüdrosüsteemide õlitoite allikaks on, sõltuvalt roolimasina liigist, erineva arvu, konstruktsiooni ja tööpõhimõttega hüdropumbad (kolb-rotatsioonradiaal-, kolb-rotatsioonaksiaal-, hammasratas-, siiber- või kruvipumbad). | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| + | Roolimasinat juhitakse [[roolikamber|roolikambrist]] roolirattaga, hoobade või juhtnuppudega harilikult elektriliste juhtajamite abil. Järgiv mehhanism seiskab roolimasina, kui rool on liikunud juhtorgani seatud pöördele vastavas ulatuses. | ||
| + | <gallery> | ||
| + | Pilt:RM1.png|Elektriline roolimasin | ||
| + | Pilt:RM2.png|a)kahe hüdrosilindriga roolimasin; b)nelja hüdrosilindriga roolimasin | ||
Pilt:RM3.png|Hammaslatt hüdromootoriga roolimasin | Pilt:RM3.png|Hammaslatt hüdromootoriga roolimasin | ||
| − | Pilt: | + | Pilt:RM4.png|Laba-pöördhüdro-mootoriga roolimasin |
| − | + | </gallery> | |
| − | + | ||
Autor: [[Jüri Kask]] | Autor: [[Jüri Kask]] | ||
==Allikad== | ==Allikad== | ||
| − | |||
*[[Heino Punab]], Jaan Läheb, Lauri Laks. Laeva abimehhanismid, seadmed ja süsteemid. TTÜ Eesti Mereakadeemia, Tallinn, 2014. ISBN 978-9985-808-57-3 | *[[Heino Punab]], Jaan Läheb, Lauri Laks. Laeva abimehhanismid, seadmed ja süsteemid. TTÜ Eesti Mereakadeemia, Tallinn, 2014. ISBN 978-9985-808-57-3 | ||
| − | *[[ | + | *[[MerLe]] |
| − | *Majandus- ja kommunikatsiooniministri määrus nr 233 | + | *[https://www.riigiteataja.ee/akt/628800 Majandus- ja kommunikatsiooniministri määrus nr 233 "Klassifitseerimata laevade seadistamise ja varustamise nõuded"] [[Kategooria: Rooliseade]] |
Viimane redaktsioon: 5. detsember 2017, kell 01:50
Roolimasin on rooliseadme täiturmehhanism, mis koosneb täiturmootorist koos selle juhtimiseks vajalike seadmete ja süsteemidega.
Rikete ja avariijuhtumite puhuks peab laevadel olema lisaks pearoolimasinale ka abiroolimasin (varuroolimasin). Pea- ja abiroolimasina juhtimissüsteemid on dubleeritud (on põhi- ja varusüsteem) ja voolukatkestuse puhul rakenduvad roolimasinad töösse avariidiiselgeneraatori käivitumisel või elektrivarustuse taastumisel automaatselt. Rumpliruumi paigutatakse ka avariijuhtimisseadmed, näidikud ja sidevahendid komandosillaga.
Vastavalt nõuetele peab pearoolimasin juhtsignaali saamisel tagama rooli panekut 35° ühest pardast 35° teise pardasse, kui laev liigub ekspluatatsioonikiirusega ja on suurima süvisega ning selleks ei või kuluda rohkem kui 28 sekundit. Abiroolimasin peab tagama rooli panekut 15° ühest pardast 15° teise pardasse mitte enama kui 60 sekundi jooksul, kui laev on suurima süvisega ja liigub ekspluatatsioonikiirusega või kiirusega 7 sõlme (sõltuvalt sellest, kumb on suurem). Kui rooliseadme juurde kuulub kaks või enam ühesugust autonoomset roolimasinat, võib abirooliseade puududa.
Varasemal ajal kasutati laevadel rooli pööramiseks mehaanilisi käsiajameid, kus jõumoment roolirattalt edastati rumplile tross-, kett- või võllülekandega, praegu võib neid olla kasutusel vaid väikestel alustel (nt väikelaevadel ja kaatritel) või abirooliseadmena. 19. sajandi lõpus hakati laevadele paigaldama käsiajami asemel aurukäitatavat roolimasinat, mida nüüdisajal praktiliselt enam ei kasutata. Nüüdislaevadel on kasutusel elektrilised või elektrohüdraulilised roolimasinad.
Elektrilise roolimasina põhiosa on palleril vabalt pööratav hammassektor, mis on seotud rumpliga elastse sidestusega (tavaliselt vedruamortisaatoriga) roolilt edastuvate lainelöökide summutamiseks. Juhtsignaali saamisel pannakse hammassektor liikuma silindrilise hammasrattaga, mille paneb pöörlema elektrimootor läbi diferentsiaaltigureduktori.
Elektrohüdraulilise roolimasina täiturajamiks võib olla:
- hammaslatt hüdromootoriga roolimasin - hüdrosilindris olev hammaslattkolb, mis pannakse liikuma juhtsignaali saamisel hüdrosilindri vastavasse töökambrisse pumbatava hüdroõli rõhu toimel, pöörab pallerit selle otsale kinnitatud silindrilise hammasratta kaudu
- kahe või nelja hüdrosilindriga roolimasin – hüdrosilindrite varbkolvid on šarniirse liuguri ja risttala kaudu ühendatud rumpliga. Juhtsignaali saamisel surutakse hüdroõli torustiku kaudu hüdrosilindrite vastavasse poolde ja varbkolvide sisse- või väljaliikumisega pööratakse rumpli ja palleri kaudu roolilehte juhtsignaaliga antud nurga võrra
- labapöördhüdromootor – mootori silindrilises keres asub otse palleri koonusele kinnitatud töölabadega rootor. Töölabad ja kere siseseinale kinnitatud töölabade liikumise piirajad moodustavad survekambrid, kuhu juhtsignaali saamisel suunatav hüdroõli rõhk paneb rootori pöörlema ja sellega koos ka palleri.
Hüdrosüsteemide õlitoite allikaks on, sõltuvalt roolimasina liigist, erineva arvu, konstruktsiooni ja tööpõhimõttega hüdropumbad (kolb-rotatsioonradiaal-, kolb-rotatsioonaksiaal-, hammasratas-, siiber- või kruvipumbad).
Roolimasinat juhitakse roolikambrist roolirattaga, hoobade või juhtnuppudega harilikult elektriliste juhtajamite abil. Järgiv mehhanism seiskab roolimasina, kui rool on liikunud juhtorgani seatud pöördele vastavas ulatuses.

Elektriline roolimasin
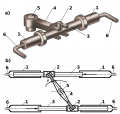
a)kahe hüdrosilindriga roolimasin; b)nelja hüdrosilindriga roolimasin
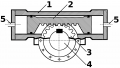
Hammaslatt hüdromootoriga roolimasin
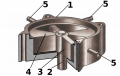
Laba-pöördhüdro-mootoriga roolimasin




Autor: Jüri Kask
Allikad
- Heino Punab, Jaan Läheb, Lauri Laks. Laeva abimehhanismid, seadmed ja süsteemid. TTÜ Eesti Mereakadeemia, Tallinn, 2014. ISBN 978-9985-808-57-3
- MerLe
- Majandus- ja kommunikatsiooniministri määrus nr 233 "Klassifitseerimata laevade seadistamise ja varustamise nõuded"